Bir lazer prosesini otomatikleştirirken en temel ekipman kararlarından biri, robotik veya gantri tabanlı bir hareket platformunun kullanılıp kullanılmayacağıdır. Her biri farklı avantajlar sunar ve hiçbiri evrensel olarak daha iyi değildir.
Doğru seçim çeşitli faktörlere bağlıdır. Bunlar arasında sürecin doğası, gerekli verim, izin verilen maliyet ve çeşitli entegrasyon kısıtlamaları yer alır.
Burada robotik ve gantry lazer sistemlerinin nasıl çalıştığını açıklayacak ve aralarındaki önemli farkları inceleyeceğiz. Bu, kendi uygulamanız için en iyi seçimi yapmanıza yardımcı olacaktır.
Robotik Lazer Sistemleri
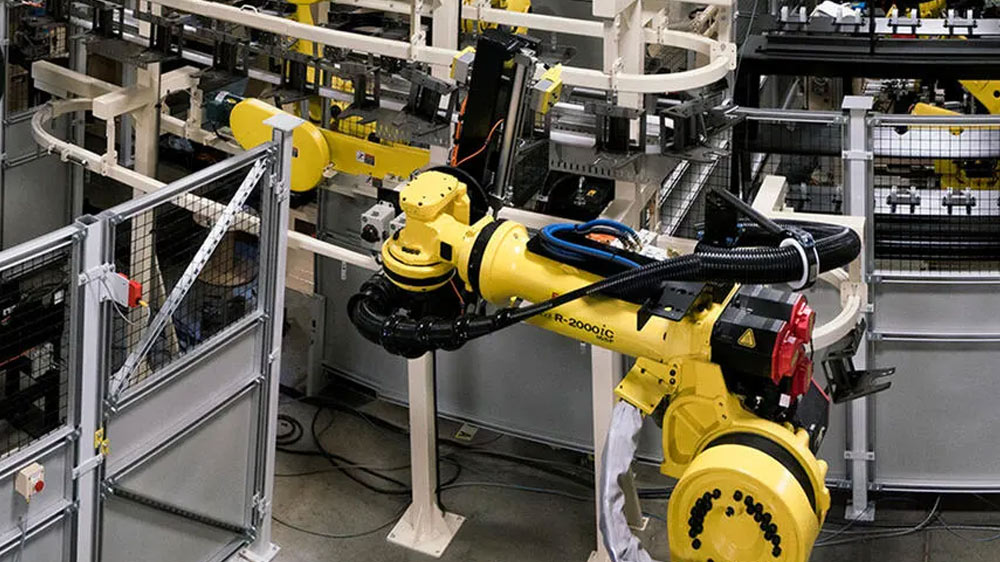
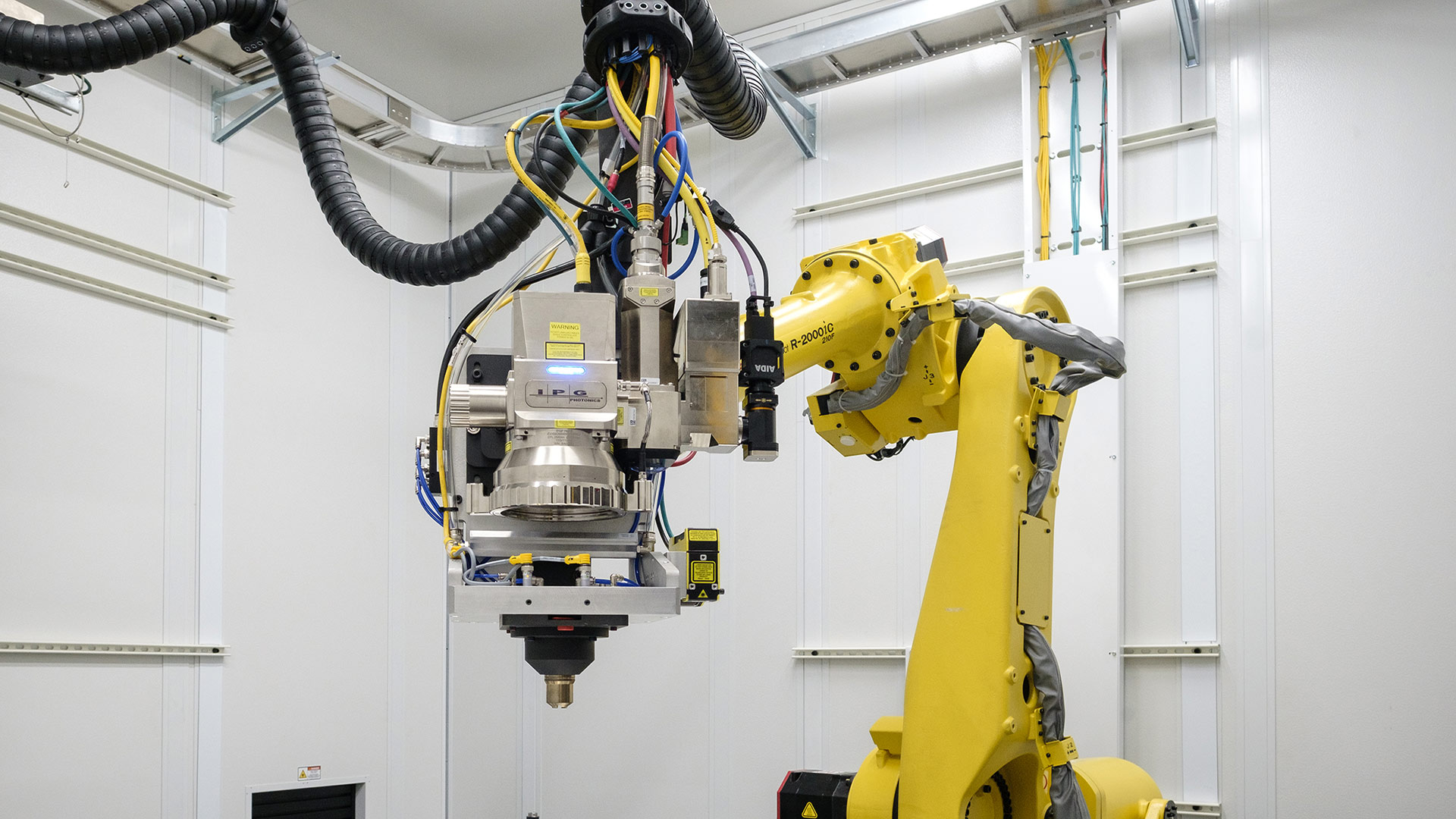
Bu otomasyon biçimi, bir lazer işleme kafasını parçalara göre hareket ettirmek için çok eksenli bir endüstriyel robot kolu kullanır. Robot kolu programlanmış bir yolu izler ve kafayı altı serbestlik derecesine kadar hareket ettirme kabiliyeti, parçaya göre çok çeşitli konumlarda ve yönlerde lazer işleme yapmasını sağlar.
Lazerin kendisi robotik kolun ucuna monte edilebilir veya sabit bir kaynaktan fiber optiklerle oraya gönderilebilir. Kol sonu takımına (EOAT) dahil edilen ışın gönderme optik leri, işleme bağlı olarak sabit odaklı optikler, yalpalama kafaları veya tarama kafaları içerebilir.
Bazı sistemlerde, parçalar sabit bir tabana veya döner tablaya sabitlenmiş takımlara monte edilir. Alternatif olarak robotik kol, hat içi üretim için bir konveyör sisteminin yanına konumlandırılabilir. Bu durumda, kol hareketi parça ile koordine edilebilir ve erişimi artırmak veya tutarlı ışın yönünü korumak için eğim veya döner eksen gibi yardımcı konumlandırıcılar kullanılabilir.
Gantry (Kartezyen Hareketli) Lazer Sistemleri
Gantry lazer sistemleri, lazer ışınını veya parçayı doğrusal X, Y ve (bazen) Z eksenleri boyunca hareket ettirmek için bir hareket platformu kullanır. Hareket, düz çizgilerden eğrilere kadar değişebilen programlanmış bir yolu izler. Ancak ışının açısı genellikle sabit kalır ve tipik olarak parça yüzeyine diktir.
Çoğu gantri sisteminde lazer gantrinin dışında bulunur ve fiber optik kablolar aracılığıyla iletilir. Gantri üzerindeki ışın iletim optikleri, işleme bağlı olarak sabit odaklı lensler, yalpalama kafaları veya tarama kafaları içerebilir. Bir tarama kafasının kullanılması, özellikle yüksek hızlı anında lazer kaynağı için yararlı olan anında (OTF) işleme yeteneklerini mümkün kılar.
Gantry sistemleri genellikle çelik veya granit çalışma platformları üzerine inşa edilir. Bu, hassas çalışmayı mümkün kılmak için son derece sağlam bir temel sağlar.
Karar Faktörleri
Robotik ve gantri sistemlerinin lazer ışınını hareket ettirmek için kullandıkları farklı yöntemler, yetenekler, maliyet ve pratik uygulama açısından farklı özelliklere neden olur. Bazı uygulamalara her ikisi de eşit derecede iyi hizmet verebilirken, çoğu durumda bir teknoloji net bir avantaj sağlar. Bu belirleme genellikle aşağıdaki faktörler göz önünde bulundurularak yapılabilir:
- Esneklik
- Hassasiyet
- Hız
- Entegrasyonla İlgili Hususlar
- Programlama
- Maliyet
Şimdi bunların her birine daha yakından bakalım.
Esneklik
Robotik lazer sistemleri, gantry sistemlerine göre çok daha fazla hareket esnekliği sunar. Robotik bir kol, parçalara neredeyse her açıdan yaklaşabilir, bu da onu karmaşık, üç boyutlu geometrileri veya bir parçanın birden fazla yüzünde bulunan özellikleri işlemek için ideal hale getirir. Bu özellik, aynı robotun düzensiz veya düzlemsel olmayan yüzeylere sahip parçaları işlemesinin gerekebileceği otomotiv montajı gibi uygulamalarda özellikle değerlidir.
Hareket açısından daha sınırlı serbestlik derecesine sahip olan gantri sistemleri genellikle düz yüzeylerde işleme için en uygun sistemlerdir. Dikey veya dönme hareketine izin vermek için ek hareket aşamaları eklenebilir, ancak bu hiçbir zaman robotik bir kolla elde edilebilecek hareket aralığıyla eşleşmeyecektir.
Parçalar karmaşık, 3D geometrilere sahipse veya aynı hücrenin çeşitli parça türlerini veya yönlerini işlemesi gerekiyorsa, robotik sistemler daha iyi bir seçim olma eğilimindedir.
Hassasiyet
Gantry lazer sistemleri genellikle robotik araçlara kıyasla üstün hassasiyet ve tekrarlanabilirlik sunar. Rijit doğrusal hareket aşamaları, düşük hareketli kütleleri ve basitleştirilmiş kinematikleri, son derece hassas yol kontrolüne olanak tanır. Gantri ve parça son derece stabil bir platform üzerine birlikte monte edildiğinde bu durum daha da gelişir.
Buna karşılık, robotik sistemler eklem sapması, boşluk ve kalibrasyon sapması nedeniyle daha fazla mekanik varyasyon ortaya çıkarır. Bu da gantry sistemlerine kıyasla doğruluklarını ve tekrarlanabilirliklerini önemli ölçüde azaltır.
Robotik sistemlerin doğruluğu ek görüş sistemleri veya kalibrasyon araçlarıyla artırılabilir. Ancak bu, hareketlerini yavaşlatır ve ayrıca maliyet ve karmaşıklık ekler.
Robotik lazer sistemleri birçok lazer kesim, kaynak ve temizleme görevi için yeterli hassasiyet sunarken, sınırlı hassasiyetleri işlem penceresini azaltabilir. Bu da onları genellikle en zorlu elektronik, tıbbi cihaz veya pil üretim uygulamaları için uygunsuz hale getirir.
Hız
Robotik ve gantri sistemlerinin göreceli hızı veya takt süresi büyük ölçüde uygulamaya bağlıdır. Ancak gantry sistemleri genellikle yüksek hızlı, tekrarlayan hareket gerektiren görevlerde robotlardan daha iyi performans gösterir.
Gantry platformları, hız üzerinde hassas kontrol sağlarken düz ve kavisli yollar boyunca hızla hareket edebilir. Bu da onları sürekli konturlar boyunca markalama, kesme veya kaynaklama için ideal hale getirir. OTF işlemenin kullanılması verimlerini daha da artırabilir.
Buna karşılık, robotik sistemler karmaşık 3D veya çok düzlemli yollarda gezinme konusunda mükemmeldir. Ancak start-stop operasyonlarında daha yavaştırlar ve hızlı yön değişiklikleri sırasında daha az kararlıdırlar. Daha büyük hareketli kütleleri ve çoklu eklemleri, gantry sistemlerine kıyasla hızlanma ve yavaşlama oranlarını azaltır.
Uygulama düz parçalar üzerinde yumuşak, sürekli hareket gerektiriyorsa, portallar daha iyi döngü süreleri sunar. Ancak çok yüzeyli erişim veya 3D kontur takibi için robotlar, parçanın yeniden konumlandırılması veya ikincil fikstürleme ihtiyacını ortadan kaldırarak genel olarak daha hızlı olabilir.
Entegrasyonla İlgili Hususlar
Robotik lazer sistemlerinin konfigürasyonu, karmaşık veya alan kısıtlaması olan üretim ortamlarına entegrasyon için doğal olarak daha fazla esneklik sağlar. Robotik bir takım bir konveyörün yanına yerleştirilebilir, kompakt bir çalışma hücresine yerleştirilebilir veya birden fazla istasyona hizmet verecek şekilde yapılandırılabilir. Bu da onları parça akışı, takım düzeni veya proses çeşitliliğinin uyarlanabilir hareket gerektirdiği uygulamalar için mükemmel kılar.
Gantry sistemleri, rijit yapısal çerçeveleri ve baş üstü hareket sistemleri nedeniyle daha büyük bir özel ayak izi gerektirme eğilimindedir. Parça erişimi genellikle dikeydir, bu da sistemin yukarı veya aşağı akış süreçleriyle nasıl entegre edileceğini sınırlayabilir. Bununla birlikte, basit bağımsız operasyonlar için gantrylerin uygulanması genellikle daha kolaydır.
Programlama
Lazer otomasyon sistemleri için kullanılan programlama ortamları üreticiye göre değişir, bu nedenle evrensel olarak doğru ifadelerde bulunmak zordur. Ancak genel olarak, özellikle CNC ekipmanlarına aşina olan kullanıcılar için gantry sistemlerinin programlanması ve kontrol edilmesi daha kolaydır.
Çoğu gantry platformu standart G kodu veya CAD'den yola yazılım kullanır. Bunlar, sabit bir makine referans çerçevesi içinde mutlak, doğrusal koordinatlarda takım yolları oluşturur.
Bu, programlanan yolun doğrudan parçanın fiziksel konumuna karşılık geldiği anlamına gelir. Bu, programlamayı oldukça basit ve sezgisel hale getirir.
Buna karşın robotik sistemler daha karmaşık yol planlaması gerektirir. Bu durum özellikle 3D uygulamalarda veya aletin farklı açılardan yaklaşması gereken durumlarda geçerlidir.
Robotik sistemlerin programlanması tipik olarak 3D modelleri içerir. Hareket, hem parçaya hem de robotun kinematik yapısına göre tanımlanmalıdır.
Bu, eklem açılarını, takım yönelimini, erişimi ve çarpışmadan kaçınmayı çözmek için matematiksel dönüşümleri içerir. Sonuç olarak, robotik sistemler daha gelişmiş yazılım araçları ve daha yüksek düzeyde eğitim gerektirmektedir.
Neyse ki robotik lazer kaynak projelerinin riski ve karmaşıklığı sanal mühendislik ve simülasyon araçları ve teknikleri ile azaltılabilir.
Diğer robotik lazer sistemleriyle karşılaştırıldığında, kobotik lazer sistemlerinin programlanması ve çalıştırılması önemli ölçüde daha kolay olacak şekilde tasarlanmıştır. Parça programlama nispeten basit olduğundan, lazer tabanlı cobot'ları çalıştırmak için daha önce robotik deneyimi olan personel gerekmez.
Maliyet
Gantry sistemleri genellikle yüksek derecede hassasiyetin gerekli olduğu basit, düz parça işleme için daha uygun maliyetlidir. Mekanik basitlikleri ve otomasyonda yaygın kullanımları, yüksek hacimli üretim için nispeten uygun fiyatlı olmalarını sağlar.
Robotik lazer sistemleri daha yüksek ilk yatırım gerektirebilir. Bu durum özellikle çok eksenli robotlar için ve güvenlik muhafazaları ve programlama araçları da maliyete dahil edildiğinde geçerlidir.
Robotik lazer sistemleri genellikle esnek veya çok amaçlı uygulamalarda daha iyi değer sunar. İşleme kafasını robotik bir kolla değiştirmek için bir takım değiştirici kullanmak bile mümkündür, bu da tek bir hücrenin kesim, kaynak veya diğer görevleri yerine getirmesini sağlar. Bu, ek ekipman ihtiyacını azaltabilir ve çeşitli üretim ortamlarında yatırım getirisini artırabilir.
Lazer Çözümüyle Başlarken
Sonuç olarak, sistem hareketine doğru yaklaşımı seçmek parça karışımınıza, performans gereksinimlerinize ve entegrasyon kısıtlamalarınıza bağlıdır.
IPG Photonics'te hem robotik hem de gantry lazer sistemleri üretiyoruz. Bir lazer sistemi veya çözümleri kullanmaya başlamak kolaydır - bize bazı örnek parçalar gönderin, küresel uygulama merkezlerimizden birini ziyaret edin veya bize uygulamanızdan bahsedin.