
机器人焊接系统可以提高生产率、改善焊接质量并降低生产成本。但实际取得的效益取决于系统的长期有效使用。
实现自动化投资回报率最大化有两种主要方法。首先是最大限度地减少系统停机时间,其次是优化运行效率。
以下是 IPG 的机器人和自动化专家为实现这些目标而推荐的 11 项 "最佳实践"。
#1.定期进行预防性和预测性维护
利用预防性和预测性维护在问题发生之前发现并解决问题,是避免生产中断的最可靠方法。在很多情况下,预防性和预测性维护还有助于保持最高水平的产品质量。
预防性维护清单上应包括的主要项目有
- 定期检查焊枪、光学器件、电缆、消耗品和冷却系统。
- 使用预测工具(物联网传感器、热监测、振动分析和激光功率反馈)来捕捉新生故障。
- 跟踪消耗品(触头、喷嘴、光学器件)的使用寿命,确保在发生故障或性能显著下降之前进行更换。
#2.积极管理消耗品和备件库存
看似简单,但忽视适当的备件库存却是一个出人意料的常见错误。备件是保证设备运行和进行必要维修的必要条件。如果手头有合适的零件,就有可能大大减少维护或修理的停机时间。
优化备件可用性:
- 提供标准消耗品(接触头、喷嘴、镜片、保护窗、金属丝衬垫),最好就在设备附近。
- 尽量减少各单元耗材的差异,以减少混淆和使用错误部件的机会。
- 考虑供应商管理库存(VMI),确保关键零部件随时可用。
#3.离线编程和模拟

设置新作业和机器人焊接路径编程需要花费时间。如果在生产系统上执行这项任务,可能会导致不必要的停机时间并中断产出。离线编程(OLP)和仿真工具可让您将这项工作转移到虚拟环境中。这样既能节省时间,又能减少出错的机会。
从离线编程中获得最大收益:
- 在部署前验证路径、周期时间和到达范围。
- 利用模拟功能,在潜在碰撞、割炬角度问题或夹具干扰发生之前就加以识别。
- 离线创建程序,无需人工授课。
#4.彻底培训操作员和维护人员

训练有素的操作员始终能从机器人焊接系统中获得最高效率和最佳效果。知识丰富的维护人员可防止小问题升级为重大停机事件,并在问题发生时更迅速地做出反应。
加强团队的技能和反应能力:
- 培训操作员快速识别和解决最常见的问题,如电线 鸟巢光学污染或系统重置程序。
- 对维护和生产人员进行交叉培训,以确保各班次的支持和覆盖范围保持一致。
- 在每个单元张贴清晰、直观的 SOP。这将有助于最大限度地减少故障排除时间,并使最佳实践标准化,从而确保质量的一致性。
#5.实施实时监控和警报
实时系统状态和焊接性能监控是预测性维护的重要辅助手段。它能让您的团队及早发现异常,防止小问题演变成长时间停机。
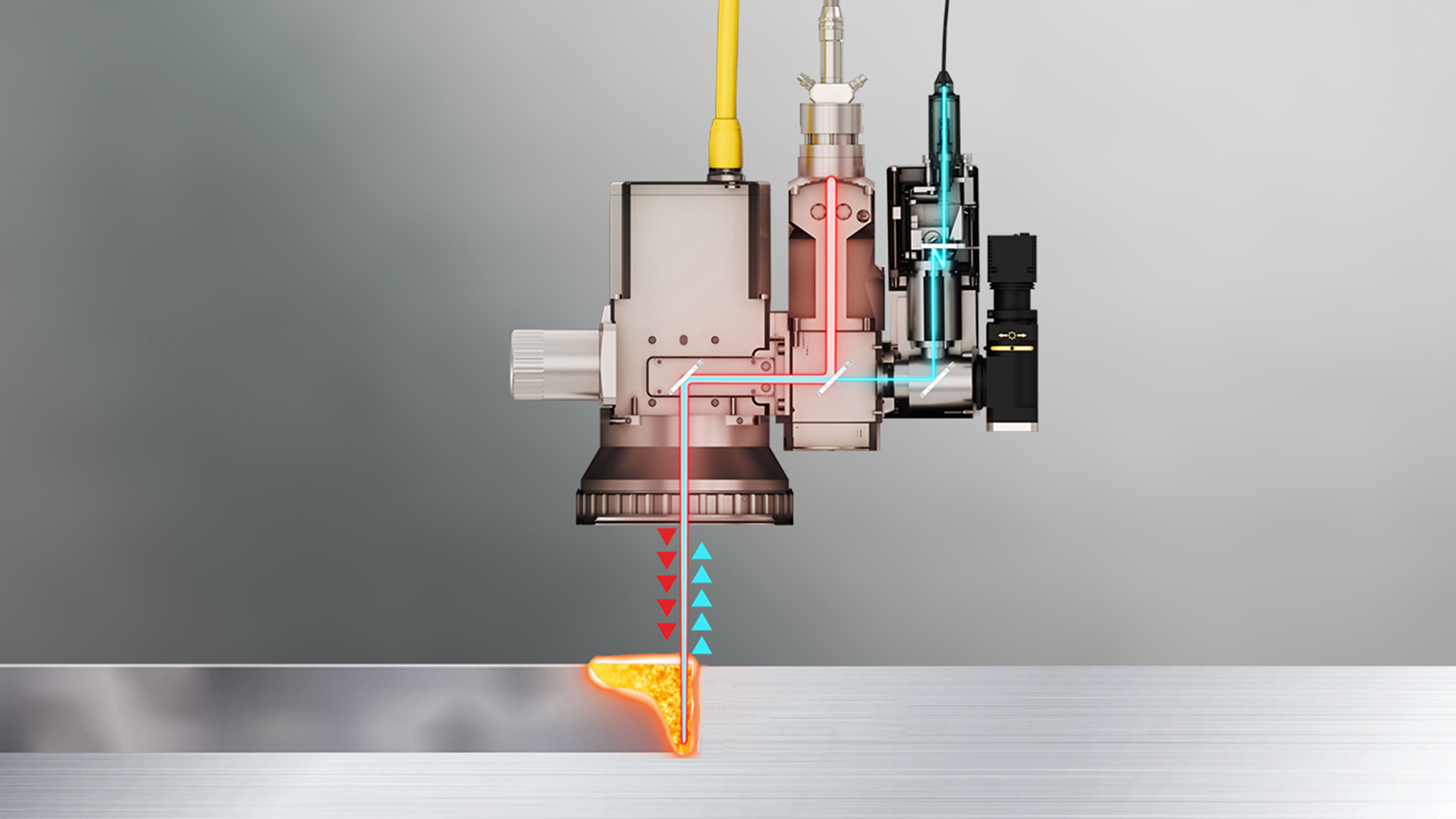
例如,与破坏性测试等质量保证方法相比,各种激光焊缝监测工具和技术都有显著改进。实时直接焊缝测量等方法可提供高度精确的几何数据,用于在缺陷焊缝出现之前进行预测。
要充分利用实时监控:
- 实施机器人状态、焊接参数和故障跟踪仪表板。
- 超过阈值或发生故障时自动发送警报(文本/电子邮件)。
- 记录停机事件以分析趋势、找出根本原因并实施应对措施。这些数据还有助于推动持续改进。
#6.保持正确的送线方式
送丝问题是导致机器人焊接停机的最常见原因之一。即使是很小的不一致也会降低焊接质量,造成不必要的停机或昂贵的返工。
确保并保持正确的送丝:
- 确认衬垫长度正确,不会在机器人铰接时产生阻力。
- 使驱动辊和张力设置与钢丝类型相匹配,以防止滑动或变形。
- 优先考虑稳定的送丝 - 它直接转化为稳定的生产。
#7.保持精确的接合和间隙控制
即使是最好的机器人焊接系统,也无法始终弥补零件对齐不良或摆放不一致的问题。夹具不佳或工件摆放不一致都会导致焊接缺陷、返工和意外停机。为了保持稳定的生产和较高的焊接质量,值得对坚固耐用、可重复的夹具进行投资。
- 使用具有 "poka-yoke "功能的精密夹具。这些夹具包括可确保工件正确方向的内置导向装置、可实现一致定位的针槽定位器以及可施加均匀夹紧力的自动夹具。
- 设计夹具,使其对操作员负载或零件公差的变化不敏感。
- 确保精确的接头安装和间隙控制,防止出现焊接间隙和故障,避免停机。
#8.快速更换维修性设计
快速更换组件的使用使日常维修更快、更简单。当出现意外问题时,它们还能最大限度地缩短平均维修时间(MTTR)。可维护性设计就是正常运行时间设计。
最大限度地提高可维护性:
- 为系统配备快速更换割炬支架、筒式光学镜组和模块化耗材。
- 简化日常维护,使技术人员能够快速、一致地完成任务。
- 通过设计降低平均故障间隔时间,确保维修所需的工具、时间和中断时间最少。
#9.为机器人提供优质部件
机器人焊接系统无法完全弥补低质量零件的缺陷。劣质或不一致的零件不可避免地会导致焊接缺陷、返工和不必要的停机时间。虽然视觉系统、焊缝跟踪和坚固的夹具等技术可以提供帮助,但它们会增加成本和复杂性。
激光焊接尤其如此。虽然激光焊接是一种能产生高质量接头的精确工艺,但与其他连接方法相比,它有时对宽公差和零件质量变化的容忍度较低。如果在设计零件、装配和上游工艺时考虑到激光焊接,那么激光焊接就能带来最大的益处。
始终如一地生产支持高质量机器人焊接的部件:
- 设计和制造公差严格、材料一致、接缝处理适当的零件。
- 在设备到达生产单元之前验证部件的一致性。这将减少返工和工艺调整的需要。
- 尽量减少对补偿技术的依赖,将其作为保障措施,而不是劣质部件的替代品。
#10.准确设置和配置机器人
准确的设置对于保持机器人焊接系统的生产效率和可靠性至关重要。工具中心点 (TCP)、主控或焊枪/光学器件完整性方面的错误会导致对准不准、焊接质量差或意外停机。定期验证和校准可保持机器人的可重复性,并在问题影响生产之前加以预防。
优化机器人的设置和配置:
- 在设置过程中和维护后,验证 TCP、母版和割炬/光学器件的正确性。
- 使用对准和位置检查来确认可重复性。这包括机器人手腕验证工具、手臂末端工具(激光或焊枪)对准和激光对准券。
- 保持校准的一致性,以减少可变性并消除因设置错误而造成的停机时间。
#11.积极控制生产环境
操作环境对机器人焊接的可靠性有直接影响。灰尘、烟雾和温度波动会降低设备性能,缩短部件寿命,尤其是激光焊接光学元件。 - 尤其是激光焊接光学元件。积极的环境控制可保护敏感系统、减少污染并保持生产顺利进行。
尽量减少对环境的影响:
- 使用有效的排烟和气流管理,最大限度地减少污染。
- 用适当的盖子保护镜片和其他光学器件,并定期进行清洁。
- 通过积极的温度和湿度控制来稳定环境,从而最大限度地提高工艺一致性,防止因高温而中断生产。
将机器人焊接视为一个持续优化的过程,而不仅仅是一次性投资。通过采取此处概述的步骤,您可以最大限度地减少停机时间,最大限度地提高效率,并始终如一地生产出高质量的零件。这将帮助您实现自动化投资的全部回报,并在未来很好地保护您的投资。
开始使用机器人解决方案
正在考虑机器人焊接解决方案?入门很简单--给我们发送一些样品零件,访问我们的全球应用中心,或者直接告诉我们您的应用。