Una delle decisioni fondamentali per l'automazione di un processo laser è se utilizzare una piattaforma di movimento robotica o a portale. Ciascuna di esse offre vantaggi distinti e nessuna è universalmente migliore.
La scelta giusta dipende da diversi fattori. Tra questi, la natura del processo stesso, la produttività richiesta, il costo ammissibile e i vari vincoli di integrazione.
Qui spiegheremo come funzionano i sistemi laser robotizzati e a portale ed esploreremo i loro principali compromessi. Questo vi aiuterà a fare la scelta migliore per la vostra applicazione.
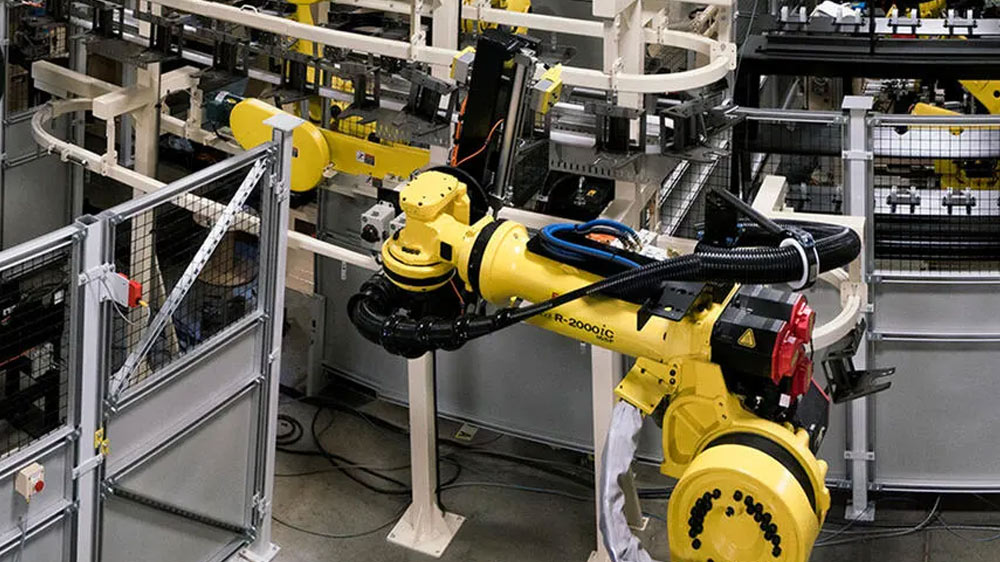
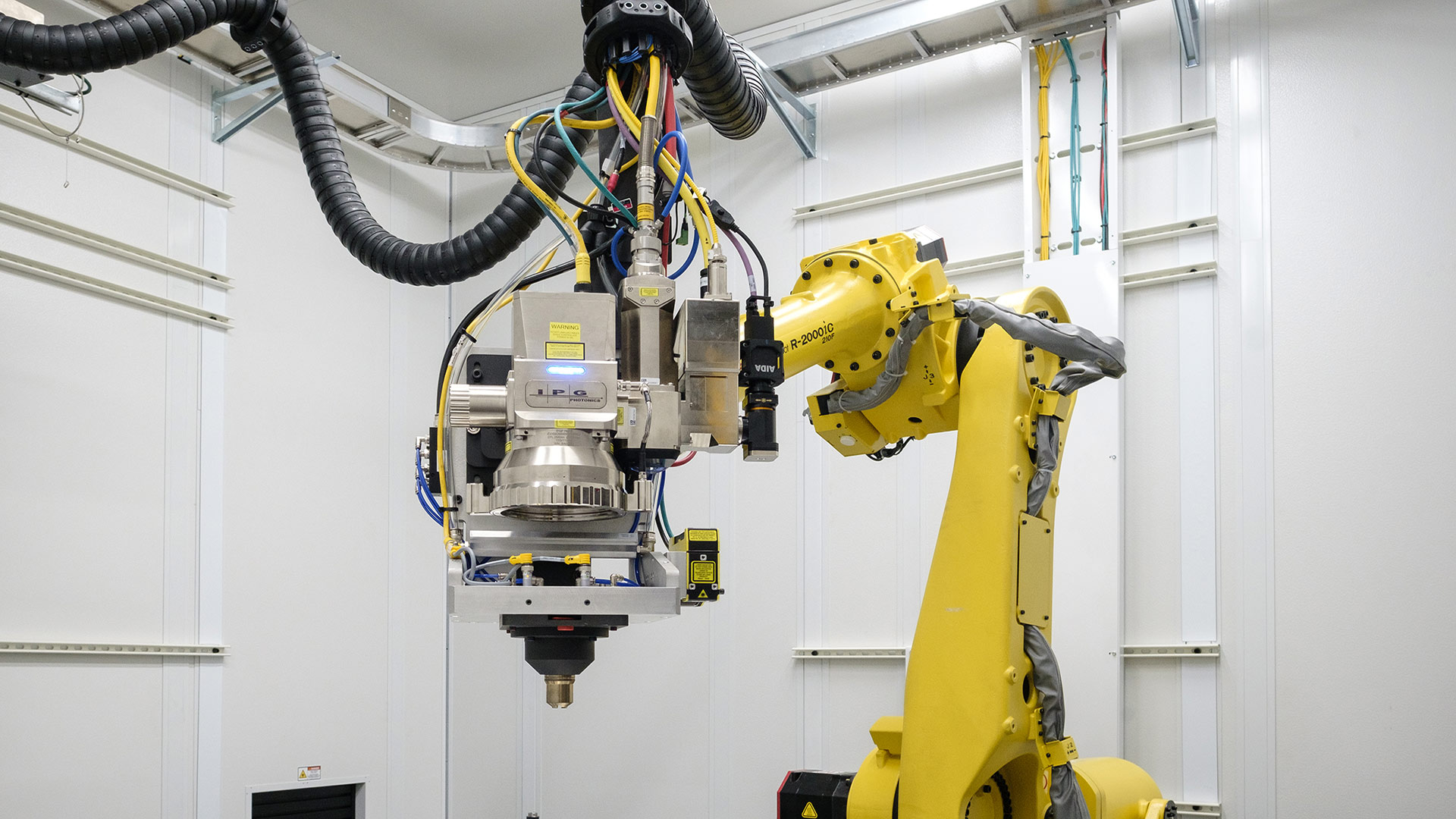
Sistemi laser robotizzati
Questa forma di automazione utilizza un braccio robotico industriale multiasse per spostare una testa di lavorazione laser in relazione ai pezzi. Il braccio robotico segue un percorso programmato e la sua capacità di muovere la testa fino a sei gradi di libertà gli consente di eseguire la lavorazione laser in un'ampia gamma di posizioni e orientamenti rispetto al pezzo.
Il laser stesso può essere montato all'estremità del braccio robotico, oppure può esservi inviato tramite fibre ottiche da una sorgente fissa. L'ottica di emissione del fascio incorporata nell'attrezzatura di fine braccio (EOAT) può includere ottiche a fuoco fisso, teste di oscillazione o teste di scansione, a seconda del processo.
In alcuni sistemi, i pezzi sono montati su utensili fissati a una base fissa o a una tavola rotante. In alternativa, il braccio robotico può essere posizionato accanto a un sistema di trasporto per la produzione in linea. In questo caso, il movimento del braccio può essere coordinato con il pezzo e si possono usare posizionatori ausiliari, come un asse di inclinazione o di rotazione, per aumentare l'accesso o mantenere un orientamento costante del fascio.
Sistemi laser a portale (movimento cartesiano)
I sistemi laser a portale utilizzano una piattaforma di movimento per spostare il raggio laser o il pezzo lungo gli assi lineari X, Y e (a volte) Z. Il movimento segue un percorso programmato che può variare da linee rette a curve. Tuttavia, l'angolo del fascio rimane solitamente fisso ed è in genere perpendicolare alla superficie del pezzo.
Nella maggior parte dei sistemi a portale, il laser è posizionato al di fuori del portale e viene erogato tramite cavi in fibra ottica. L'ottica di emissione del fascio sul portale può includere lenti a fuoco fisso, teste oscillanti o teste di scansione, a seconda del processo. L'uso di una testa di scansione consente capacità di elaborazione al volo (OTF), particolarmente utili per la saldatura laser al volo ad alta velocità.
I sistemi a portale sono spesso costruiti su piattaforme di lavoro in acciaio o granito. In questo modo si ottiene una base altamente stabile per consentire un lavoro di precisione.
Fattori decisionali
I diversi metodi utilizzati dai sistemi robotizzati e a portale per spostare il fascio laser si traducono in caratteristiche distinte in termini di capacità, costi e implementazione pratica. Sebbene alcune applicazioni possano essere ugualmente soddisfatte da entrambi, nella maggior parte dei casi una delle due tecnologie offre un chiaro vantaggio. Questa determinazione può essere fatta di solito considerando i seguenti fattori:
- Flessibilità
- Precisione
- Velocità
- Considerazioni sull'integrazione
- Programmazione
- Costo
Diamo un'occhiata più da vicino a ciascuno di essi.
Flessibilità
I sistemi laser robotizzati offrono una flessibilità di movimento molto maggiore rispetto ai sistemi a portale. Un braccio robotico può avvicinarsi ai pezzi praticamente da qualsiasi angolazione, il che lo rende ideale per la lavorazione di geometrie complesse e tridimensionali o di caratteristiche situate su più facce di un pezzo. Questa capacità è particolarmente preziosa in applicazioni come l'assemblaggio di autoveicoli, dove lo stesso robot può dover lavorare pezzi con superfici irregolari o non planari.
Con gradi di libertà più limitati in termini di movimento, i sistemi a portale sono generalmente più adatti alla lavorazione su superfici piane. È possibile aggiungere ulteriori stadi di movimento per consentire il movimento verticale o rotazionale, ma questo non potrà mai eguagliare la gamma di movimento ottenibile con un braccio robotico.
Quando i pezzi hanno geometrie 3D complesse o se la stessa cella deve lavorare una varietà di tipi di pezzi o di orientamenti, i sistemi robotizzati tendono a essere la scelta migliore.
Precisione
I sistemi laser a portale offrono generalmente una precisione e una ripetibilità superiori rispetto agli strumenti robotizzati. I loro rigidi stadi di movimento lineare, la bassa massa in movimento e la cinematica semplificata consentono un controllo del percorso estremamente accurato. Questa caratteristica è ulteriormente migliorata quando il portale e il pezzo sono montati insieme su una piattaforma altamente stabile.
Al contrario, i sistemi robotici introducono una maggiore variazione meccanica dovuta alla deflessione dei giunti, al gioco e alla deriva della calibrazione. Ciò riduce notevolmente la loro precisione e ripetibilità rispetto ai sistemi a portale.
La precisione dei sistemi robotici può essere migliorata con sistemi di visione o strumenti di calibrazione aggiuntivi. Tuttavia, ciò rallenta il loro movimento e aggiunge costi e complessità.
Sebbene i sistemi laser robotizzati offrano una precisione sufficiente per molte attività di taglio, saldatura e pulizia laser, la loro limitata accuratezza può ridurre la finestra di processo. Ciò li rende generalmente inadatti alle applicazioni più impegnative nel campo dell'elettronica, dei dispositivi medici o della fabbricazione di batterie.
Velocità
La velocità relativa o il takt time dei sistemi robotici e dei sistemi a portale dipende in larga misura dall'applicazione. Tuttavia, i sistemi a portale superano in genere i robot nelle attività che richiedono movimenti ripetitivi ad alta velocità.
Le piattaforme a portale possono muoversi rapidamente lungo percorsi rettilinei e curvilinei, mantenendo un controllo preciso della velocità. Questo le rende ideali per la marcatura, il taglio o la saldatura lungo contorni continui. L'uso dell'elaborazione OTF può aumentare ulteriormente la loro produttività.
I sistemi robotici, invece, eccellono nella navigazione di percorsi complessi in 3D o su più piani. Ma sono più lenti nelle operazioni di avvio e arresto e meno stabili nei rapidi cambi di direzione. La massa mobile più grande e le articolazioni multiple riducono i tassi di accelerazione e decelerazione rispetto ai sistemi a portale.
Se l'applicazione richiede un movimento fluido e continuo su pezzi piatti, i carriponte offrono tempi di ciclo migliori. Ma per l'accesso a più facce o per seguire i contorni in 3D, i robot possono essere complessivamente più veloci, eliminando la necessità di riposizionare i pezzi o di effettuare un fissaggio secondario.
Considerazioni sull'integrazione
La configurazione dei sistemi laser robotizzati offre intrinsecamente una maggiore flessibilità per l'integrazione in ambienti di produzione complessi o con limiti di spazio. Uno strumento robotizzato può essere posizionato accanto a un trasportatore, inserito in una cella di lavoro compatta o configurato per servire più stazioni. Questo li rende ideali per le applicazioni in cui il flusso dei pezzi, la disposizione degli utensili o la varietà del processo richiedono un movimento adattativo.
I sistemi a portale tendono a richiedere un ingombro maggiore a causa dei loro telai strutturali rigidi e del sistema di movimento aereo. L'accesso ai pezzi è generalmente verticale, il che può limitare l'integrazione del sistema con i processi a monte o a valle. Tuttavia, per semplici operazioni autonome, i portali sono spesso più facili da implementare.
Programmazione
Gli ambienti di programmazione utilizzati per i sistemi di automazione laser variano a seconda del produttore, quindi è difficile fare affermazioni universalmente vere. Tuttavia, in generale, i sistemi a portale sono più facili da programmare e controllare, soprattutto per gli utenti che hanno già familiarità con le apparecchiature CNC.
La maggior parte delle piattaforme a portale utilizza un codice G standard o un software CAD-to-path. Questi generano percorsi utensile in coordinate assolute e lineari all'interno di un quadro di riferimento fisso della macchina.
Ciò significa che il percorso programmato corrisponde direttamente alla posizione fisica del pezzo. Questo rende la programmazione piuttosto semplice e intuitiva.
I sistemi robotici, invece, richiedono una pianificazione del percorso più complessa. Ciò è particolarmente vero nelle applicazioni 3D o quando l'utensile deve avvicinarsi da diverse angolazioni.
La programmazione dei sistemi robotizzati prevede in genere l'uso di modelli 3D. Il movimento deve essere definito in relazione sia al pezzo che alla struttura cinematica del robot.
Ciò comporta trasformazioni matematiche per risolvere gli angoli delle articolazioni, l'orientamento dell'utensile, lo sbraccio e la prevenzione delle collisioni. Di conseguenza, i sistemi robotici richiedono strumenti software più avanzati e un livello di formazione più elevato.
Fortunatamente, il rischio e la complessità dei progetti di saldatura laser robotizzata possono essere ridotti grazie a strumenti e tecniche di ingegneria e simulazione virtuale.
Rispetto ad altri sistemi laser robotizzati, i sistemi laser cobot sono progettati per essere molto più semplici da programmare e utilizzare. Poiché la programmazione dei pezzi è relativamente semplice, i cobot basati sul laser non richiedono personale con una precedente esperienza di robotica per essere utilizzati.
Costo
I sistemi a portale sono generalmente più convenienti per la lavorazione di pezzi semplici e piatti, dove è richiesto un alto grado di precisione. La loro semplicità meccanica e l'uso diffuso nell'automazione li rendono relativamente accessibili per la produzione di grandi volumi.
I sistemi laser robotizzati possono comportare un investimento iniziale più elevato. Ciò è particolarmente vero per i robot multiasse e quando si considerano anche le custodie di sicurezza e gli strumenti di programmazione.
I sistemi laser robotizzati offrono di solito un valore migliore nelle applicazioni flessibili o multiuso. È persino possibile utilizzare un dispositivo di cambio utensile per sostituire la testa di lavorazione con un braccio robotico, consentendo a una singola cella di tagliare, saldare o eseguire altre operazioni. Ciò può ridurre la necessità di attrezzature aggiuntive e migliorare il ROI in diversi ambienti di produzione.
Come iniziare con una soluzione laser
In definitiva, la scelta del giusto approccio al movimento del sistema dipende dalla combinazione di pezzi, dai requisiti di prestazione e dai vincoli di integrazione.
In IPG Photonics costruiamo sistemi laser sia robotizzati che a portale. Iniziare a lavorare con un sistema o una soluzione laser è facile: inviateci dei campioni, visitate uno dei nostri centri applicativi globali o parlateci della vostra applicazione.