Jedním z nejzásadnějších rozhodnutí o vybavení při automatizaci laserového procesu je, zda použít robotickou nebo portálovou pohybovou platformu. Každá z nich nabízí odlišné výhody a ani jedna není univerzálně lepší.
Správná volba závisí na několika faktorech. Patří mezi ně povaha samotného procesu, požadovaná propustnost, přípustné náklady a různá integrační omezení.
Vysvětlíme vám, jak fungují robotické a portálové laserové systémy, a prozkoumáme jejich klíčové kompromisy. To vám pomůže při výběru nejlepšího řešení pro vaši vlastní aplikaci.
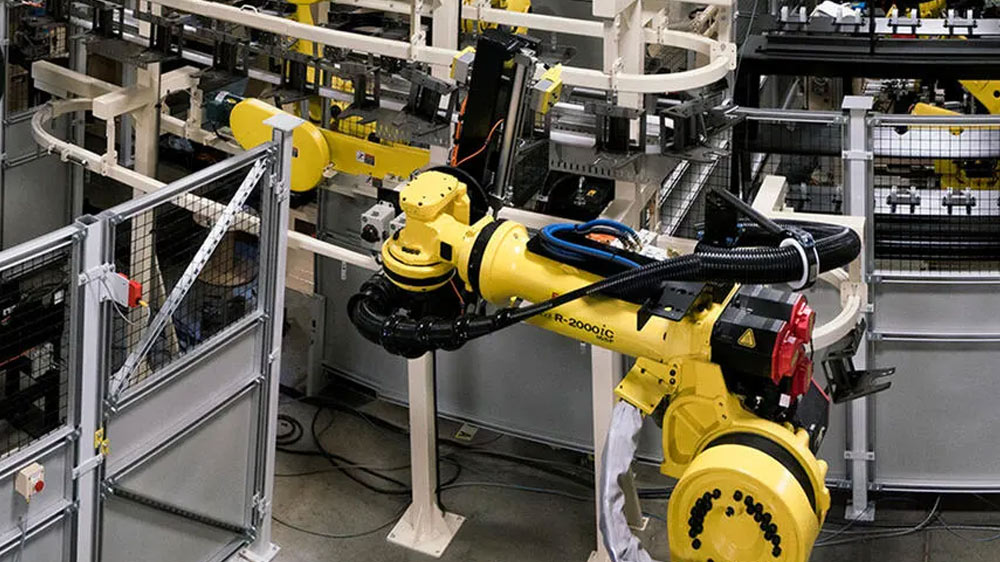
Robotické laserové systémy
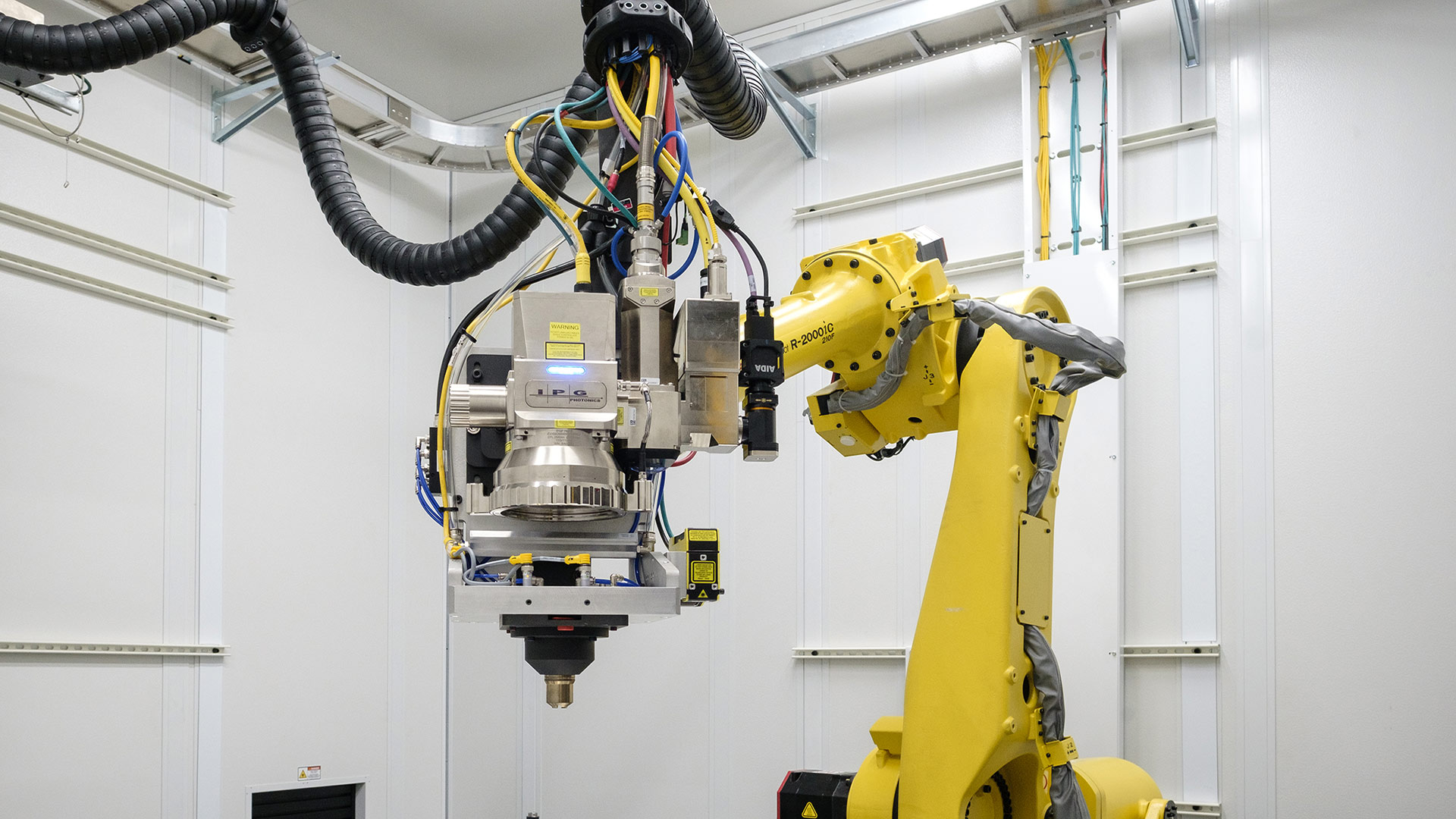
Tato forma automatizace využívá víceosé průmyslové robotické rameno k pohybu laserové hlavy vůči dílům. Robotické rameno sleduje naprogramovanou dráhu a jeho schopnost pohybovat hlavou až v šesti stupních volnosti mu umožňuje provádět laserové zpracování v širokém rozsahu poloh a orientací vzhledem k dílu.
Samotný laser může být namontován na konci robotického ramene nebo může být přiváděn optickými vlákny ze stacionárního zdroje. Optika dodávající paprsek, která je součástí nástrojů na konci ramene (EOAT), může v závislosti na procesu zahrnovat optiku s pevným ohniskem, kmitací hlavy nebo skenovací hlavy.
Vněkterých systémech jsou díly upevněny na nástrojích připevněných kpevné základně nebo otočnému stolu. Případně může být robotické rameno umístěno vedle dopravníkového systému pro inline výrobu. V takovém případě lze pohyb ramene koordinovat s dílem a pro zvýšení přístupu nebo udržení konzistentní orientace nosníku lze použít pomocné polohovadla - například naklápěcí nebo otočnou osu.
Portálové (kartézské) laserové systémy
Portálové laserové systémy používají pohyblivou plošinu, která pohybuje buď laserovým paprskem, nebo dílem podél lineárních os X, Y a (někdy) Z. Pohyb probíhá po naprogramované dráze, která může být různá, od přímek až po křivky. Úhel paprsku však obvykle zůstává pevný a je obvykle kolmý k povrchu dílu.
U většiny portálových systémů je laser umístěn mimo portál a je přiváděn pomocí optických kabelů. Optika pro přenos paprsku na portálu může v závislosti na procesu zahrnovat čočky s pevným ohniskem, kývavé hlavy nebo skenovací hlavy. Použití skenovací hlavy umožňuje zpracování za chodu (OTF ), které je obzvláště užitečné pro vysokorychlostní laserové svařování za chodu.
Portálové systémy jsou často postaveny na ocelových nebo žulových pracovních plošinách. To poskytuje vysoce stabilní základnu umožňující přesnou práci.
Rozhodovací faktory
Rozdílné metody, které robotické a portálové systémy používají k pohybu laserového paprsku, mají odlišné vlastnosti z hlediska možností, nákladů a praktického provedení. Ačkoli některé aplikace mohou být stejně dobře obsluhovány oběma, ve většině případů poskytuje jedna z technologií jasnou výhodu. Toto určení lze obvykle provést na základě následujících faktorů:
- Flexibilita
- Přesnost
- Rychlost
- Úvahy o integraci
- Programování
- Náklady
Podívejme se na každou z nich blíže.
Flexibilita
Robotické laserové systémy nabízejí mnohem větší flexibilitu pohybu než portálové systémy. Robotické rameno se může přiblížit k dílům prakticky z jakéhokoli úhlu, což je ideální pro zpracování složitých trojrozměrných geometrií nebo prvků umístěných na více plochách dílu. Tato schopnost je obzvláště cenná v aplikacích, jako je montáž v automobilovém průmyslu, kde může být potřeba, aby stejný robot zpracovával díly s nepravidelnými nebo nerovnými povrchy.
Díky omezenějším stupňům volnosti pohybu jsou portálové systémy obecně nejvhodnější pro zpracování na rovných plochách. Lze přidat další pohybové stupně umožňující vertikální nebo rotační pohyb, ale to se nikdy nevyrovná rozsahu pohybu dosažitelnému pomocí robotického ramene.
Pokud mají díly složitou 3D geometrii nebo pokud musí stejná buňka zpracovávat různé typy nebo orientace dílů, jsou lepší volbou robotické systémy.
Přesnost
Portálové laserové systémy obecně nabízejí vyšší přesnost a opakovatelnost ve srovnání s robotickými nástroji. Jejich tuhé lineární pohybové stupně, nízká pohyblivá hmotnost a zjednodušená kinematika umožňují vysoce přesné řízení dráhy. To se dále zvyšuje, když jsou portál a díl namontovány společně na vysoce stabilní platformě.
Naproti tomu u robotických systémů dochází k většímu mechanickému kolísání v důsledku vychýlení kloubů, vůle a kalibračního posunu. To podstatně snižuje jejich přesnost a opakovatelnost ve srovnání s portálovými systémy.
Přesnost robotických systémů lze zvýšit pomocí dalších systémů vidění nebo kalibračních nástrojů. To však zpomaluje jejich pohyb a také zvyšuje náklady a složitost.
Robotické laserové systémy sice nabízejí dostatečnou přesnost pro mnoho úkolů laserového řezání, svařování a čištění, ale jejich omezená přesnost může omezit okno procesu. To je obecně činí nevhodnými pro nejnáročnější aplikace v oblasti elektroniky, lékařských přístrojů nebo výroby baterií.
Rychlost
Relativní rychlost nebo doba takt robotických a portálových systémů je velmi závislá na aplikaci. Portálové systémy však obvykle překonávají roboty v úlohách vyžadujících vysokou rychlost a opakovaný pohyb.
Portálové plošiny se mohou rychle pohybovat po přímých i zakřivených drahách a zároveň si zachovávají přesnou kontrolu nad rychlostí. Díky tomu jsou ideální pro značení, řezání nebo svařování podél souvislých kontur. Použití zpracování OTF může dále zvýšit jejich propustnost.
Naproti tomu robotické systémy vynikají v navigaci po složitých 3D nebo víceplošných trasách. Jsou však pomalejší při operacích start-stop a méně stabilní při rychlých změnách směru. Jejich větší pohyblivá hmotnost a více kloubů snižují rychlost zrychlení a zpomalení ve srovnání s portálovými systémy.
Pokud aplikace vyžaduje plynulý, nepřetržitý pohyb po plochých dílech, nabízejí portály lepší časy cyklů. Pro přístup k více plochám nebo sledování 3D kontur však mohou být roboty celkově rychlejší, protože odpadá nutnost změny polohy dílu nebo sekundárního upevnění.
Úvahy o integraci
Konfigurace robotických laserových systémů ze své podstaty poskytuje větší flexibilitu pro integraci do složitých nebo prostorově omezených výrobních prostředí. Robotický nástroj lze umístit vedle dopravníku, umístit do kompaktní pracovní buňky nebo nakonfigurovat tak, aby obsluhoval více stanic. Díky tomu se skvěle hodí pro aplikace, kde tok dílů, uspořádání nástrojů nebo rozmanitost procesu vyžadují přizpůsobivý pohyb.
Portálové systémy obvykle vyžadují větší vyhrazenou plochu kvůli tuhým konstrukčním rámům a systému pohybu nad hlavou. Přístup k dílům je obvykle vertikální, což může omezovat způsob integrace systému s předcházejícími nebo navazujícími procesy. Pro jednoduché samostatné operace jsou však portálové systémy často snadněji realizovatelné.
Programování
Programovací prostředí používaná pro laserové automatizační systémy se u jednotlivých výrobců liší, takže je obtížné vyslovit univerzálně platné tvrzení. Obecně však platí, že portálové systémy se snadněji programují a ovládají, zejména pro uživatele, kteří již znají zařízení CNC.
Většina portálových platforem používá standardní G-kód nebo software CAD-to-path. Ty generují dráhy nástrojů v absolutních lineárních souřadnicích v pevném referenčním rámci stroje.
To znamená, že naprogramovaná cesta odpovídá přímo fyzickému umístění dílu. Programování je tak poměrně jednoduché a intuitivní.
Robotické systémy naopak vyžadují složitější plánování cesty. To platí zejména pro 3D aplikace nebo v případech, kdy se nástroj musí přibližovat z různých úhlů.
Programování robotických systémů obvykle zahrnuje 3D modely. Pohyb musí být definován vzhledem k součásti i kinematické struktuře robota.
To zahrnuje matematické transformace pro řešení úhlů kloubů, orientace nástroje, dosahu a zamezení kolize. Robotické systémy proto vyžadují pokročilejší softwarové nástroje a vyšší úroveň školení.
Riziko a složitost projektů robotického laserového svařování lze naštěstí snížit pomocí virtuálních inženýrských a simulačních nástrojů a technik.
V porovnání s jinými robotickými laserovými systémy jsou kobotické laserové systémy navrženy tak, aby se výrazně snadněji programovaly a ovládaly. Vzhledem k tomu, že programování dílů je poměrně jednoduché, nevyžadují koboty na bázi laseru k obsluze pracovníky s předchozími zkušenostmi s roboty.
Náklady
Portálové systémy jsou obecně cenově výhodnější pro jednoduché obrábění plochých dílů, kde je vyžadován vysoký stupeň přesnosti. Jejich mechanická jednoduchost a široké využití v automatizaci je činí relativně cenově dostupnými pro velkosériovou výrobu.
Robotické laserové systémy mohou vyžadovat vyšší počáteční investice. To platí zejména pro víceosé roboty a v případě, že se do nákladů započítávají také bezpečnostní kryty a programovací nástroje.
Robotické laserové systémy obvykle poskytují lepší hodnotu ve flexibilních nebo víceúčelových aplikacích. Dokonce je možné použít měnič nástrojů, který umožňuje vyměnit zpracovatelskou hlavu za robotické rameno, což umožňuje řezat, svařovat nebo provádět jiné úkoly v jedné buňce. To může snížit potřebu dalšího vybavení a zlepšit návratnost investic v různých výrobních prostředích.
Začínáme s laserovým řešením
Volba správného přístupu k pohybu systému závisí na skladbě dílů, požadavcích na výkon a integračních omezeních.
Ve společnosti IPG Photonics vyrábíme robotické i portálové laserové systémy. Začít s laserovým systémem nebo řešením je snadné - pošlete nám vzorové díly, navštivte jedno z našich globálních aplikačních center nebo nám prostě řekněte o své aplikaci.