Een van de meest fundamentele apparatuurbeslissingen bij het automatiseren van een laserproces is de keuze voor een robot- of een portaalgebaseerd bewegingsplatform. Beide bieden duidelijke voordelen en geen van beide is universeel beter.
De juiste keuze hangt af van verschillende factoren. Deze omvatten de aard van het proces zelf, de vereiste verwerkingscapaciteit, de toegestane kosten en verschillende integratiebeperkingen.
Hier leggen we uit hoe robot- en portaallasersystemen werken en wat hun belangrijkste voordelen zijn. Dit zal u helpen de beste keuze te maken voor uw eigen applicatie.
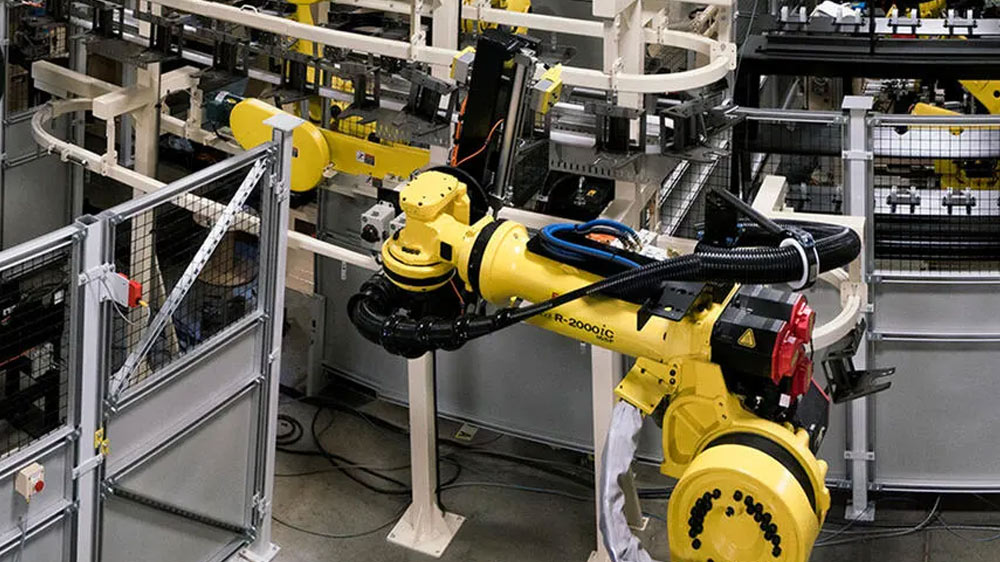
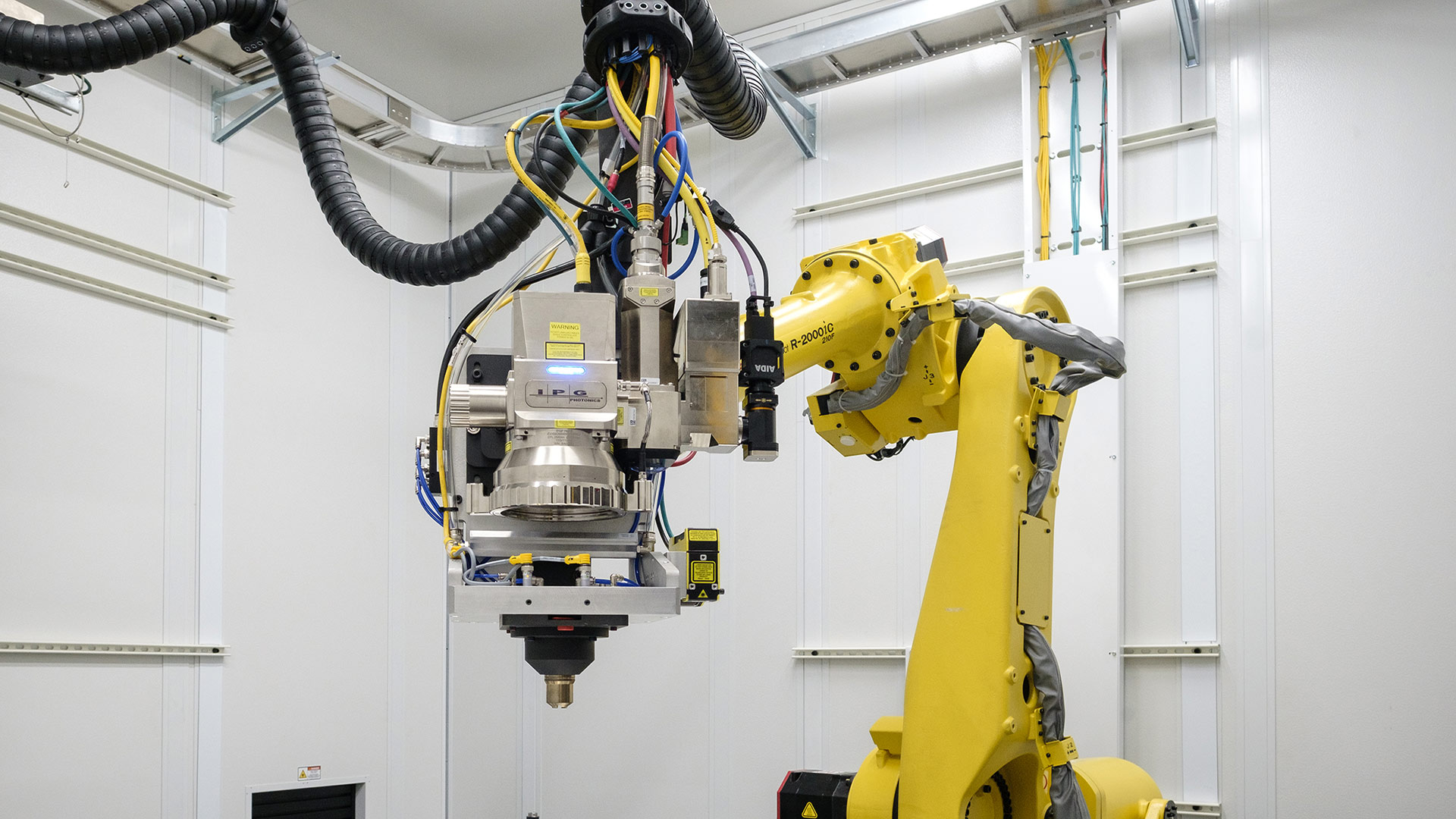
Robotlasersystemen
Deze vorm van automatisering maakt gebruik van een multi-axis industriële robotarm om een kop te bewegen ten opzichte van onderdelen. De robotarm volgt een geprogrammeerd pad en dankzij de mogelijkheid om de kop in maximaal zes vrijheidsgraden te bewegen, kan hij laserbewerkingen uitvoeren in een groot aantal posities en oriëntaties ten opzichte van het onderdeel.
De laser zelf kan Gemonteerde zijn aan het einde van de robotarm, of hij kan daar geleverd worden door fiber van een stationaire bron. De optiekbeam delivery die is ingebouwd in de end-of-arm tooling (EOAT) kan bestaan uit optiek met vaste focus, wobble koppen of scan koppen , afhankelijk van het proces.
In sommige systemen worden onderdelen Gemonteerde aan tooling bevestigd op een vaste basis of draaitafel. Als alternatief kan de robotarm naast een transportsysteem geplaatst worden voor inline productie. In dit geval kan de armbeweging gecoördineerd worden met het werkstuk en kunnen hulppositioneerders - zoals een kantel- of rotatieas - gebruikt worden om de toegang te vergroten of een consistente straaloriëntatie te behouden.
PortaallasersystemenCartesian beweging)
Portaallasersystemen gebruiken een bewegingsplatform om ofwel de laserstraal ofwel het werkstuk langs lineaire X-, Y- en (soms) Z-assen te bewegen. De beweging volgt een geprogrammeerd pad dat kan variëren van rechte lijnen tot krommingen. Maar de hoek van de straal blijft meestal vast en staat meestal loodrecht op het werkstukoppervlak.
Bij de meeste portaalsystemen bevindt de laser zich buiten het portaal en wordt hij geleverd via fiber . Afhankelijk van het proces kan de optiek beam delivery op het portaal bestaan uit lenzen met vaste focus, wobble koppen of scan koppen . Het gebruik van een scan kop maakt on-the-fly (OTF) bewerkingsmogelijkheden mogelijk die bijzonder nuttig zijn voor het op hoge snelheid on-the-fly laserlassen.
Portaalsystemen worden vaak gebouwd op stalen of granieten werkplatforms. Dit zorgt voor een zeer stabiele basis om precisiewerk mogelijk te maken.
Beslissingsfactoren
De verschillende methoden die robot- en portaalsystemen gebruiken om de laserstraal te verplaatsen, resulteren in verschillende kenmerken op het gebied van mogelijkheden, kosten en praktische implementatie. Hoewel sommige toepassingen even goed kunnen worden bediend door een van beide, biedt in de meeste gevallen een van beide technologieën een duidelijk voordeel. Dit kan meestal worden bepaald door de volgende factoren in overweging te nemen:
- Flexibiliteit
- Precisie
- Snelheid
- Overwegingen voor integratie
- Programmeren
- Kosten
Laten we ze eens van dichtbij bekijken.
Flexibiliteit
Robotlasersystemen bieden een veel grotere bewegingsflexibiliteit dan portaalsystemen. Een robotarm kan onderdelen vanuit vrijwel elke hoek benaderen, waardoor hij ideaal is voor het bewerken van complexe, driedimensionale geometrieën of onderdelen op meerdere oppervlakken van een onderdeel. Deze mogelijkheid is vooral waardevol in toepassingen zoals assemblage in de auto-industrie, waar dezelfde robot onderdelen met onregelmatige of niet-vlakke oppervlakken moet bewerken.
Met beperktere vrijheidsgraden in termen van beweging zijn portaalsystemen over het algemeen het meest geschikt voor verwerking op vlakke oppervlakken. Er kunnen extra bewegingsfasen worden toegevoegd om verticale of roterende bewegingen mogelijk te maken, maar dit zal nooit het bewegingsbereik evenaren dat kan worden bereikt met een robotarm.
Als producten complexe 3D-geometrieën hebben of als dezelfde cel verschillende producttypes of oriëntaties moet verwerken, zijn robotsystemen vaak de betere keuze.
Precisie
Portaallasersystemen bieden over het algemeen een superieure precisie en herhaalbaarheid in vergelijking met gerobotiseerde gereedschappen. Hun stijve lineaire bewegingstrappen, lage bewegende massa en vereenvoudigde kinematica maken zeer nauwkeurige trajectbesturing mogelijk. Dit wordt nog verder verbeterd wanneer het portaal en het werkstuk samen Gemonteerde zijn op een zeer stabiel platform.
Robotsystemen daarentegen introduceren meer mechanische variatie door verbinding , speling en kalibratiedrift. Dit verlaagt hun nauwkeurigheid en herhaalbaarheid aanzienlijk in vergelijking met portaalsystemen.
De nauwkeurigheid van robotsystemen kan worden verbeterd met extra vision of kalibratiehulpmiddelen. Dit vertraagt echter hun bewegingen en voegt ook kosten en complexiteit toe.
Hoewel robotlasersystemen voldoende precisie bieden voor veel lasersnij-, las- en cleaning , kan hun beperkte nauwkeurigheid het procesvenster verkleinen. Dit maakt ze over het algemeen ongeschikt voor de meest veeleisende toepassingen op het gebied van elektronica, medische devices of batterijproductie.
Snelheid
De relatieve snelheid of takttijd van robot- en portaalsystemen is sterk afhankelijk van applicatie . Maar portaalsystemen presteren meestal beter dan robots bij taken waarbij snelle, repetitieve bewegingen nodig zijn.
Portaalplatforms kunnen snel langs rechte en gebogen paden bewegen terwijl ze de snelheid nauwkeurig onder controle houden. Dit maakt ze ideaal voor markeren, snijden of lassen langs doorlopende contouren. Het gebruik van OTF-verwerking kan hun verwerkingscapaciteit nog verhogen.
Robotsystemen daarentegen blinken uit in het navigeren door complexe 3D-paden of paden die uit meerdere vlakken bestaan. Maar ze zijn trager bij start-stopbewerkingen en minder stabiel bij snelle richtingsveranderingen. Hun grotere bewegende massa en meerdere gewrichten verminderen de versnellings- en vertragingssnelheden in vergelijking met portaalsystemen.
Als de applicatie een vloeiende, continue beweging over vlakke onderdelen vereist, bieden portalen betere cyclustijden. Maar voor toegang tot meerdere vlakken of het volgen van 3D-contouren kunnen robots in het algemeen sneller zijn omdat ze het product niet opnieuw hoeven te positioneren of geen secundaire opspanning nodig hebben.
Overwegingen voor integratie
De configuratie van robotlasersystemen biedt inherent meer flexibiliteit voor integratie in complexe of ruimtebeperkte productieomgevingen. Een gerobotiseerd gereedschap kan naast een transportband geplaatst worden, in een compacte werkcel geplaatst worden of geconfigureerd worden om meerdere stations te bedienen. Hierdoor zijn ze ideaal voor toepassingen waar de productstroom, de lay-out van tooling of de procesvariëteit een adaptieve beweging vereisen.
Portaalsystemen hebben vaak een groter vloeroppervlak nodig vanwege hun stijve structuur en het bovenliggende bewegingssysteem. De toegang tot onderdelen is meestal verticaal, wat de integratie van het systeem met stroomopwaartse of stroomafwaartse processen kan beperken. Voor eenvoudige autonome bewerkingen zijn portaalsystemen echter vaak eenvoudiger te implementeren.
Programmeren
De programmeeromgevingen die gebruikt worden voor laserautomatiseringssystemen verschillen per fabrikant, dus het is moeilijk om algemeen geldende uitspraken te doen. Over het algemeen zijn portaalsystemen echter eenvoudiger te programmeren en te bedienen, vooral voor gebruikers die al bekend zijn met CNC-apparatuur.
De meeste portaalplatforms gebruiken standaard G-code of CAD-to-path software. Deze genereren gereedschapspaden in absolute, lineaire coördinaten binnen een vast machinereferentiekader.
Dit betekent dat het geprogrammeerde pad direct overeenkomt met de fysieke locatie van het onderdeel. Dit maakt programmeren vrij eenvoudig en intuïtief.
Robotsystemen vereisen daarentegen een complexere padplanning. Dit geldt vooral voor 3D-toepassingen of wanneer het gereedschap vanuit verschillende hoeken moet benaderen.
Bij het programmeren van robotsystemen worden meestal 3D-modellen gebruikt. Beweging moet worden gedefinieerd ten opzichte van zowel het onderdeel als de kinematische structuur van de robot.
Dit omvat wiskundige transformaties om verbinding , gereedschapsoriëntatie, reikwijdte en het vermijden van botsingen op te lossen. Als gevolg hiervan vereisen robotsystemen meer geavanceerde softwaretools en een hoger opleidingsniveau.
Gelukkig kunnen het risico en de complexiteit van robotlaserprojecten worden verminderd met virtuele engineering- en simulatietools en -technieken.
Vergeleken met andere robotlasersystemen zijn cobotische lasersystemen ontworpen om aanzienlijk eenvoudiger te programmeren en te bedienen. Omdat het programmeren van onderdelen relatief eenvoudig is, is voor het bedienen van lasergebaseerde cobots geen personeel met eerdere robotervaring nodig.
Kosten
Portaalsystemen zijn over het algemeen meer Kosten Efficiënte voor eenvoudige bewerkingen van vlakke producten waarbij een hoge mate van precisie vereist is. Hun mechanische eenvoud en wijdverbreide toepassing in automatisering maken ze relatief betaalbaar voor massaproductie.
Robotlasersystemen kunnen een hogere initiële investering met zich meebrengen. Dit geldt vooral voor multi-axis robots en wanneer ook de veiligheidsbehuizingen en programmeerhulpmiddelen in de kosten worden meegerekend.
Robotlasersystemen leveren meestal meer op in flexibele of multifunctionele toepassingen. Het is zelfs mogelijk om een gereedschapswisselaar te gebruiken om de kop te verwisselen met een robotarm, zodat een enkele cel kan snijden, lassen of andere taken kan uitvoeren. Dit kan de behoefte aan extra apparatuur verminderen en de ROI verbeteren in diverse productieomgevingen.
Aan de slag met een laseroplossing
Uiteindelijk hangt de keuze voor de juiste benadering van systeembeweging af van de mix van onderdelen, prestatievereisten en integratiebeperkingen.
Bij IPG Photonics bouwen we zowel robot- als portaallasersystemen. Aan de slag gaan met een lasersysteem of -oplossingen is eenvoudig - stuur ons enkele voorbeeldonderdelen, bezoek een van onze wereldwijde applicatie of vertel ons gewoon over uw applicatie.